信号与系统¶
约 1612 个字 8 张图片 预计阅读时间 8 分钟
信号的描述¶
注意连续信号\(x(t)\)==与离散信号\(x[n]\)==在表示上的区别
周期信号¶
定义:\(x(t)=x(t+mT), m=0,\pm1,\pm2\)...,其中最小正值\(T\)被称为基波周期
别的求法之类的就和高中一样了
奇信号与偶信号¶
即类似奇函数与偶函数
信号都可以分解成奇分量与偶分量之和,且分解的方式是唯一的
- 其中偶分量为偶(Even)函数,满足\(x_e(t)=x_e(-t)\)
- 其中奇分量为奇(Odd)函数,满足\(x_o(t)=-x_o(-t)\)
并且: $$ x_e(t)=\frac{1}{2}[x(t)+x(-t)]\ x_o(t)=\frac{1}{2}[x(t)-x(-t)] $$ 离散信号也是同理,只不过\((t)\)换成了\([n]\) $$ x_e[n]=\frac{1}{2}{x[n]+x[n]}\ x_o[n]=\frac{1}{2}{x[n]-x[n]} $$
功率信号与能量信号¶
一个信号的能量和功率是这样定义的:
-
设信号\(x(t)\)为电压或电流
-
则它在\(1\Omega\)的电阻上的瞬时功率为:\(p(t)=|x(t)|^2\)\(\longleftarrow\)之所以是模的平方,是因为\(x(t)\)可能是复数
在\(t_1\le t\le t_2\)内消耗的能量为:\(E=\int_{t_1}^{t_2} |x(t)|^2dt\)
- 当\(T=(t_2-t_1)\longrightarrow \infty\)时,总能量\(E\)和平均功率\(P\)分别定义为:
在\(n_1\le n\le n_2\)内的离散时间信号的总能量和平均功率是
在无穷大区间内,离散时间信号总能量\(E\)和平均功率\(P\)分别定义为
能量信号(能量有限信号)¶
信号\(x(t)\)的能量\(E\)满足:\(0<E<\infty\),而==\(P=0\)==
功率信号(简称能量信号)¶
信号\(x(t)\)的功率\(P\)满足:\(0<P<\infty\),而==\(E=\infty\)==
常用的公式¶
欧拉公式¶
积化和差&和差化积¶
\[ \begin{aligned} \sin (\alpha+\beta) & =\sin (\alpha) \cos (\beta)+\cos (\alpha) \sin (\beta) \\ \sin (\alpha-\beta) & =\sin (\alpha) \cos (\beta)-\cos (\alpha) \sin (\beta) \\ \cos (\alpha+\beta) & =\cos (\alpha) \cos (\beta)-\sin (\alpha) \sin (\beta) \\ \cos (\alpha-\beta) & =\cos (\alpha) \cos (\beta)+\sin (\alpha) \sin (\beta) \\ \sin (\alpha) \cos (\beta) & =\frac{1}{2}[\sin (\alpha+\beta)+\sin (\alpha-\beta)] \\ \cos (\alpha) \sin (\beta) & =\frac{1}{2}[\sin (\alpha+\beta)-\sin (\alpha-\beta)] \\ \cos (\alpha) \cos (\beta) & =\frac{1}{2}[\cos (\alpha+\beta)+\cos (\alpha-\beta)] \\ \sin (\alpha) \sin (\beta) & =\frac{1}{2}[\cos (\alpha-\beta)-\cos (\alpha+\beta)] \\ \sin ^{2}(\alpha) & =\frac{1}{2}[1-\cos (2 \alpha)] \\ \cos ^{2}(\alpha) & =\frac{1}{2}[1+\cos (2 \alpha)] \end{aligned} \]
连续时间信号¶
单位阶跃信号¶
在跳变点\(t=0\)处无定义
- 延迟的单位阶跃信号,其表示为:
利用单位阶跃信号表示矩形脉冲¶
矩形脉冲定义为:\(G(t)=u(t)-u(t-t_0)\)
用阶跃信号与延迟的阶跃信号之差表示
冲激信号¶

与\(u(t)\)的关系: $$ u(t)=\int_{-\infty}^{t}\delta(t)dt\ \delta(t)=\frac{du(t)}{dt} $$
抽样函数¶
定义¶
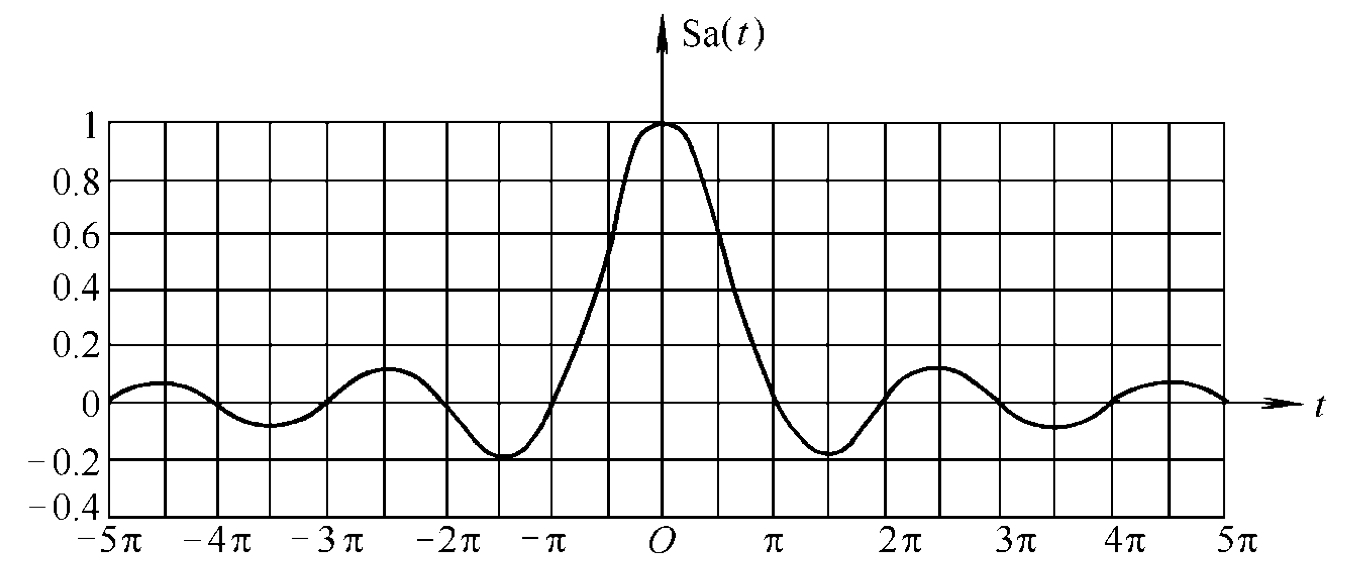
性质¶
离散时间信号¶
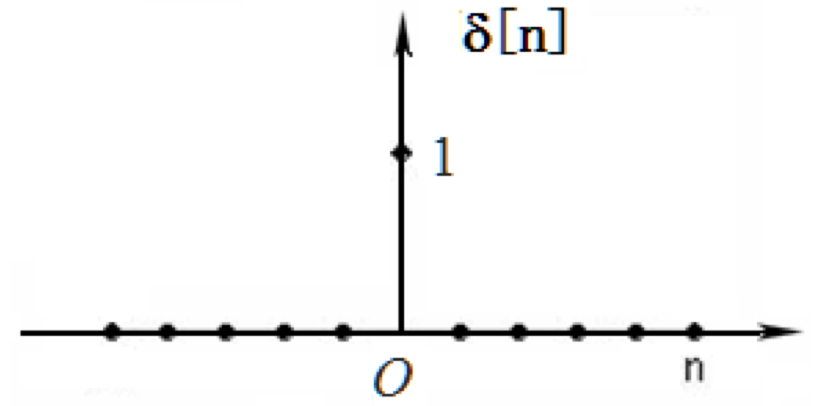
单位冲击序列¶
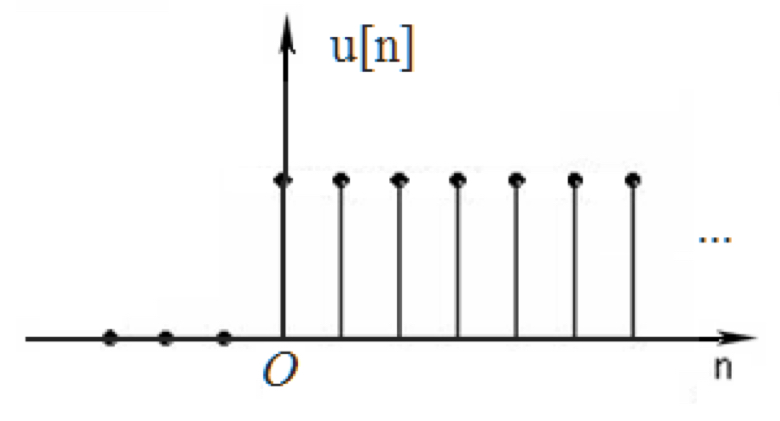
单位阶跃序列¶
一些公式¶
其中\(x[k]\)为\(n=k\)时,\(x[n]\)的值;\(\delta[n-k]\)在\(n=k\)时值为1,在\(n\ne k\)时值为0
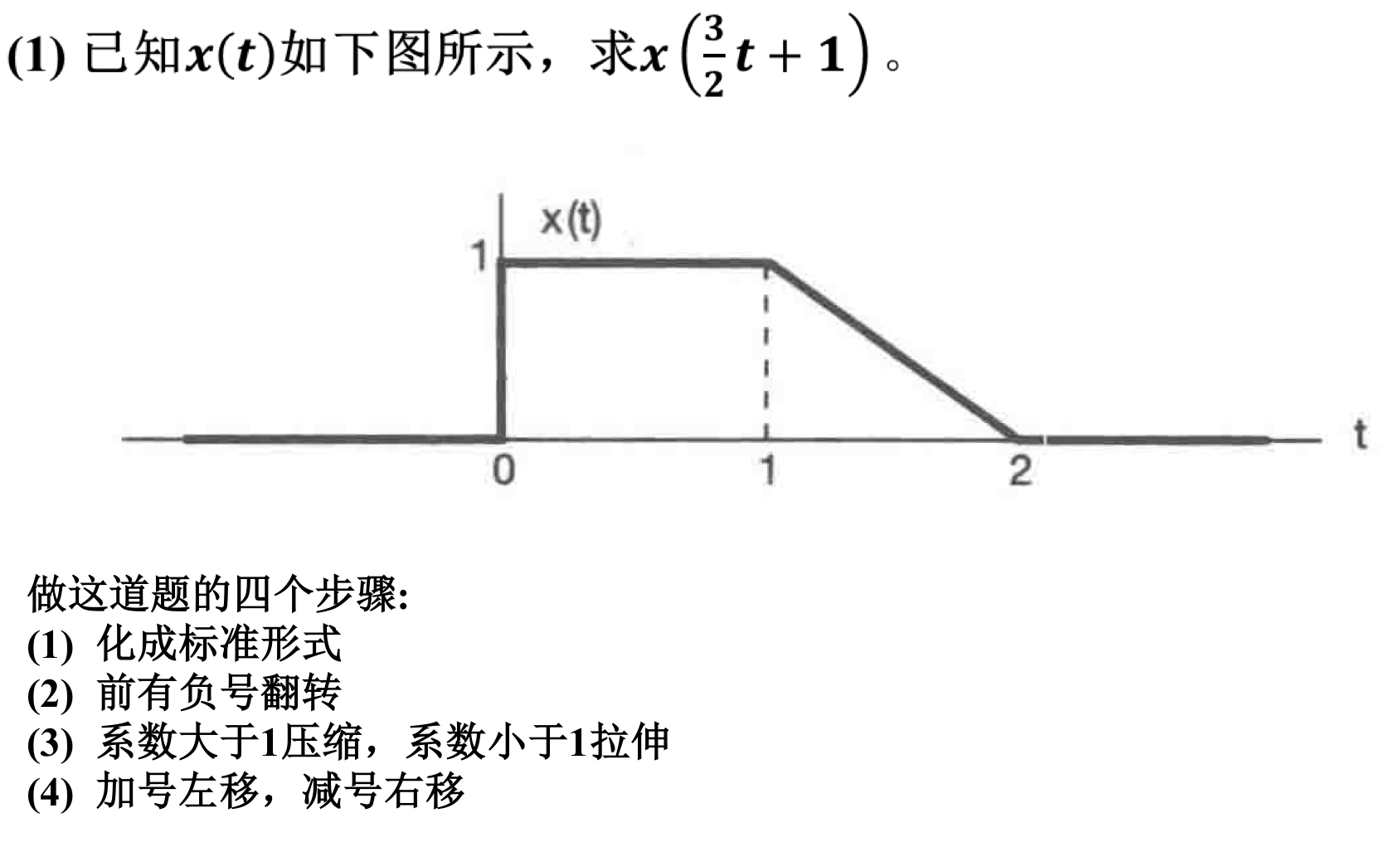
信号的运算与自变量变换¶
个人认为是高中题
系统的基本性质¶
线性系统与非线性系统¶
性质(需要同时满足)¶
- 齐次性:
如果\(\forall x(t)\rightarrow y(t)\),那么对\(\forall a \in R\),都有\(ax(t)\rightarrow ay(t)\)
- 叠加性:
如果\(\forall x_1(t)\rightarrow y_1(t)\),\(\forall x_2(t)\rightarrow y_2(t)\),那么\(\forall x_1(t)+x_2(t)\rightarrow y_1(t)+y_2(t)\)
如果一个系统不是线性系统,那么它就是非线性系统
两个线性系统的串联仍是线性系统,两个线性系统的并联仍是线性系统
线性系统判据:每一项都有x,每一项x的系数都是1
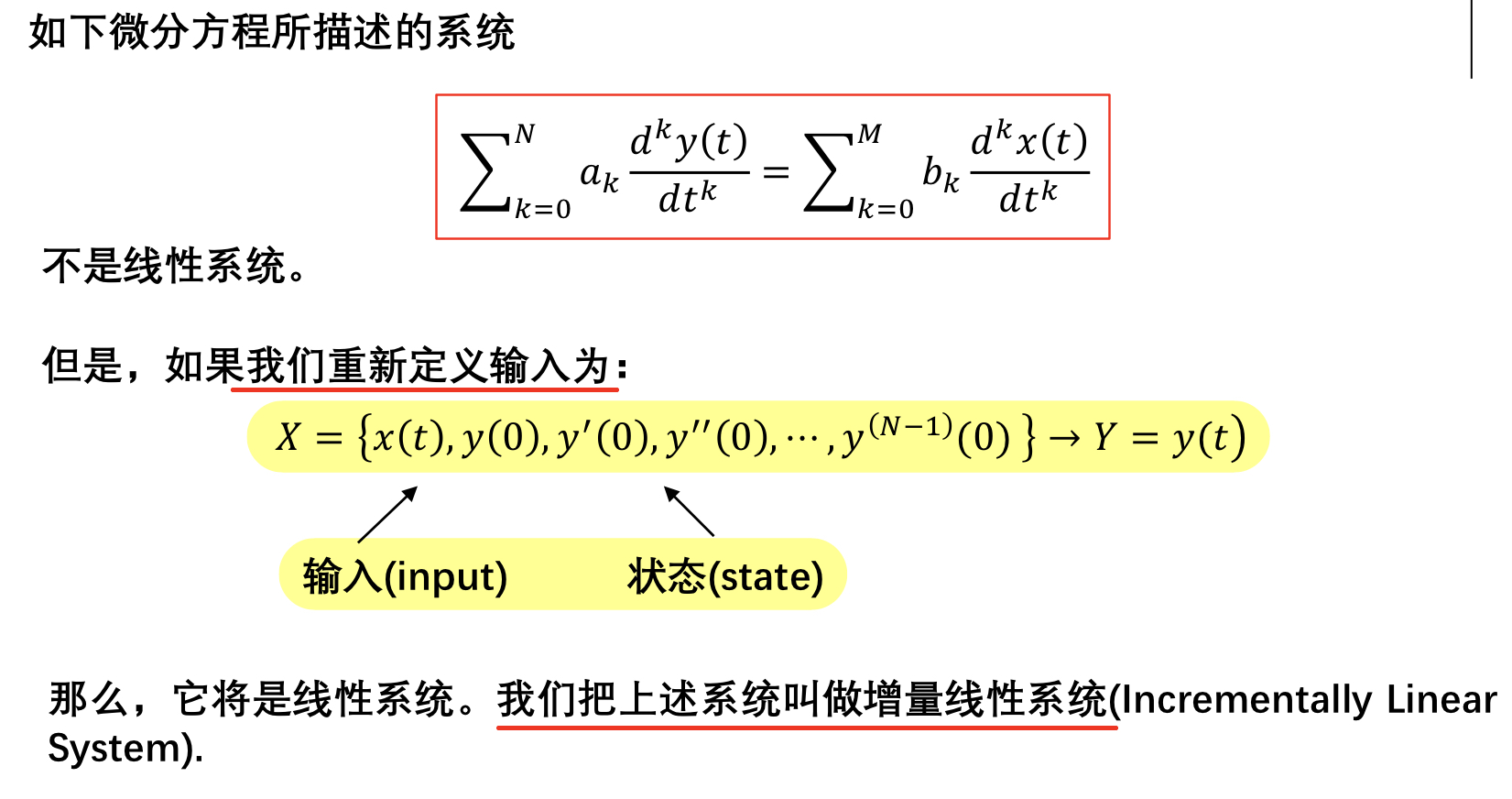
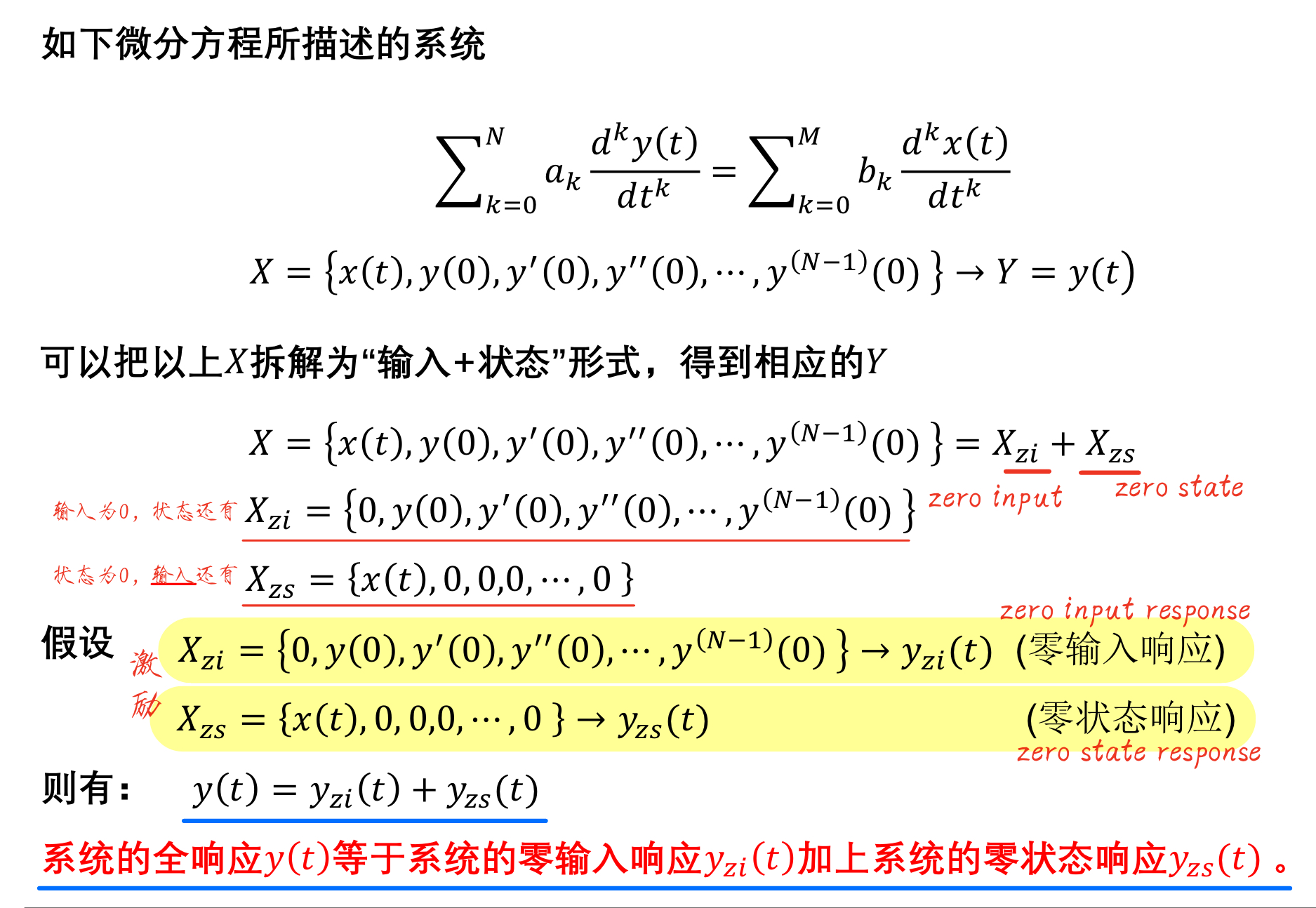
增量线性系统¶
时不变系统¶
性质¶
如果\(\forall x(t)\rightarrow y(t)\),那么对\(\forall t_0 \in R\),都有\(x(t-t_0)\rightarrow y(t-t_0)\)。即系统的输出不受时间的影响
两个时不变系统串联仍是时不变系统,两个时不变系统并联仍是时不变系统
时不变系统判据:所有\(t\)都在\(x\)的括号内,所有\(t\)只能是\(t\)
记忆系统与无记忆系统¶
如果一个系统的输出==仅仅决定于该时刻的输入==,则该系统称为无记忆系统
无记忆系统判据:\(y\)括号里和\(x\)括号里一样
因果系统与非因果系统¶
如果一个系统在任何时刻的输出只决定于现在以及过去的输入,而与系统以后的输入无关,就称该系统为因果系统
非因果性就意味着系统不可实现性
因果系统判据:\(y\)括号里小于等于\(x\)括号里(所有无记忆系统都是因果系统)
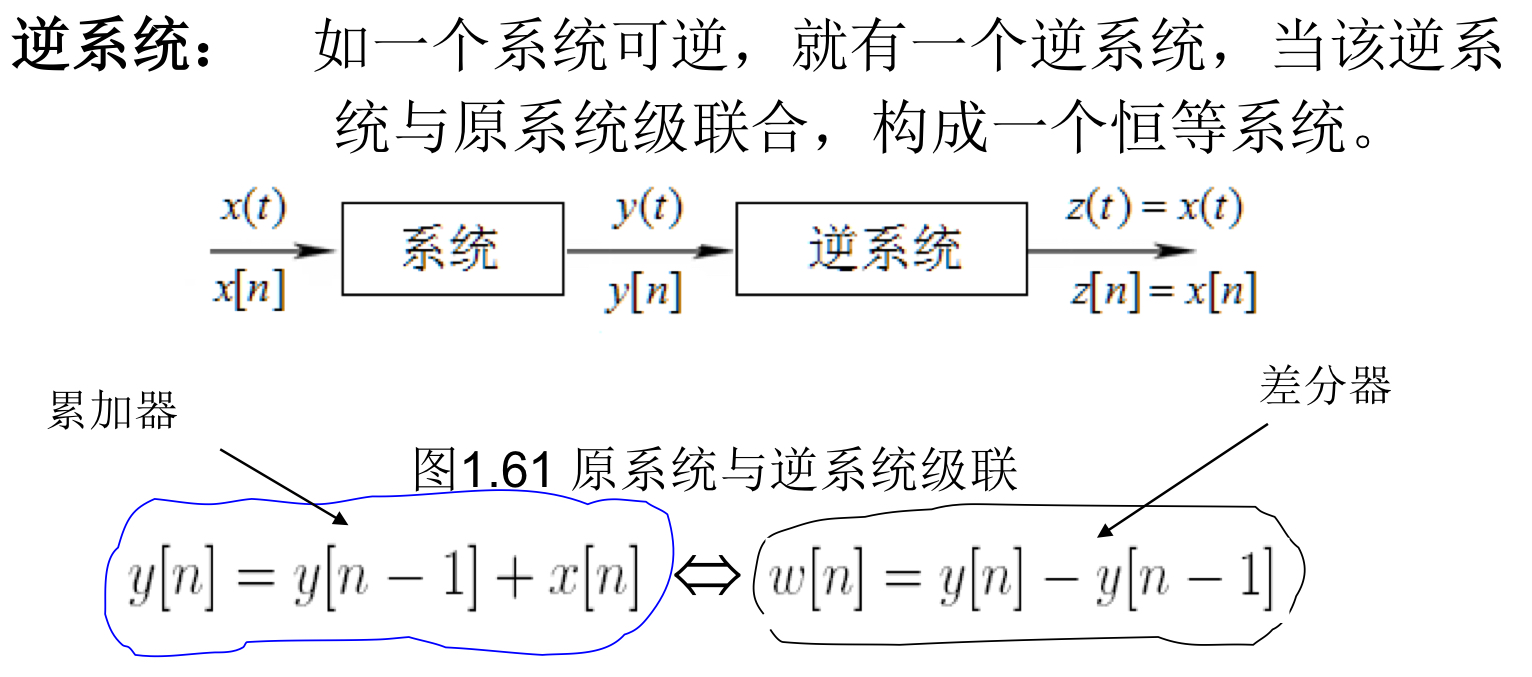
可逆系统与不可逆系统¶
就是相当于函数与反函数
- 可逆性:不同的输入下有不同的输出
- 不可逆性:一个系统分别对两个或两个以上不同的输入,能产生相同的输出
系统的稳定性¶
- 稳定性:输入是有界的,则系统的输出也必须是有界的
系统性质判定
- 线性系统:
判据:每一项都有\(x\),每一项\(x\)的次数都是 1
- 时不变系统:
判据:所有\(t\)都在x的括号()或[]内,所有\(t\)只能是\(t\)
- 因果系统:
判据:与以后的输入无关,决定于现在以及过去(可以仅有其中一个)
- 无记忆系统:
判据:\(y\)中的和\(x\)中的一样,仅仅取决于现在时刻
- 可逆系统:
判据:不同的输入有不同的输出,感觉和高中的可逆函数差不多
- 稳定系统:
判据:输入有界时,输出也是有界的